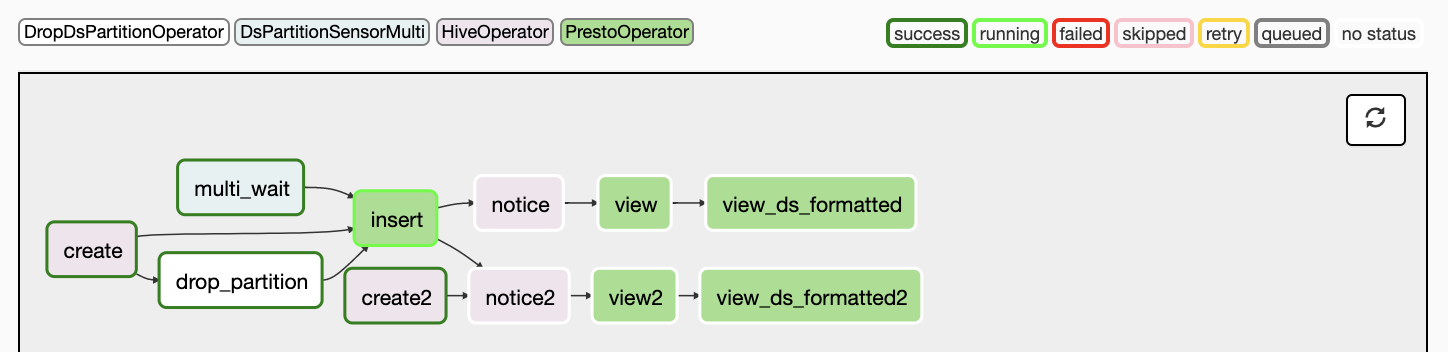
Optimizing waits in Airflow
Marton Trencseni - Sat 01 February 2020 • Tagged with data, airflow, python
Sometimes I get to put on my Data Engineering hat for a few days. I enjoy this because I like to move up and down the Data Science stack and I try to keep myself sharp technically. Recently I was able to spend a few days optimizing our Airflow ETL for speed.